pfupfu
-
Gesamte Inhalte
5.278 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
5
Inhaltstyp
Profile
Forum
Kalender
Shop
Articles
Community Map
Alle Inhalte von pfupfu
-

V50 Special vergammelt in der Tiefgarage, wie kann ich der neue Besitzer werden?
pfupfu antwortete auf peremyjorridge's Thema in Blabla
Aber echt! Immer schön vernünftig bleiben Leute Edit: bezog sich auf @shanana -
Lambretta-Vergaserabstimmung mit Breitband(lambda)sonde
pfupfu antwortete auf gravedigger's Thema in Technik allgemein
Bei mir sieht das immer so aus Dicke Batterie im Kasten, MTX-L im Deckel und ein Koso Laptimer als GPS Tacho. Und ab geht die wilde Fahrt das lässt sich auch bei 120 noch ablesen. 130 fährt die Bude nicht
-
reserviert Edit: Und wech!
-
Lambretta-Vergaserabstimmung mit Breitband(lambda)sonde
pfupfu antwortete auf gravedigger's Thema in Technik allgemein
Ich bin mit meinem innovate mtx-l sehr zufrieden -
PID ist die Macht abgesehen vom Spieltrieb will ich ja ne Drehzahl einstellen und nicht ständig am Poti die Drehzahl nachregeln. Die Regelung funktioniert und spricht gut an. Die Drehzahl mache ich dann später in 5kmh Schritten variabel. Die Auswertung des Tachosignals funktioniert gut, nach den ersten Problemen hab ich mir die maximale sample rate angeschaut und festgestellt dass mein Code das Problem ist jetzt mit den richtigen encoder ticks und ohne Integer Division läuft das mit 25ms Auflösung gut bei mir. Mehr ginge auch noch aber dann sind allmählich zu wenig ticks da und ich sehe keine Verbesserung mehr in der Regelung.
-
- GSF Preis: 1800,- so wie sie ist. Hier liegt noch eine Stoffi ETS Welle und neue Kolbenringe, wenn ich Muße hab die einzubauen geht der Preis auf über 2000 hoch - Mein Eigentum - Steht in Mainz - Fahrbereit - HU 05/2025 Mehr Infos im Kaufberatungstopic:
-
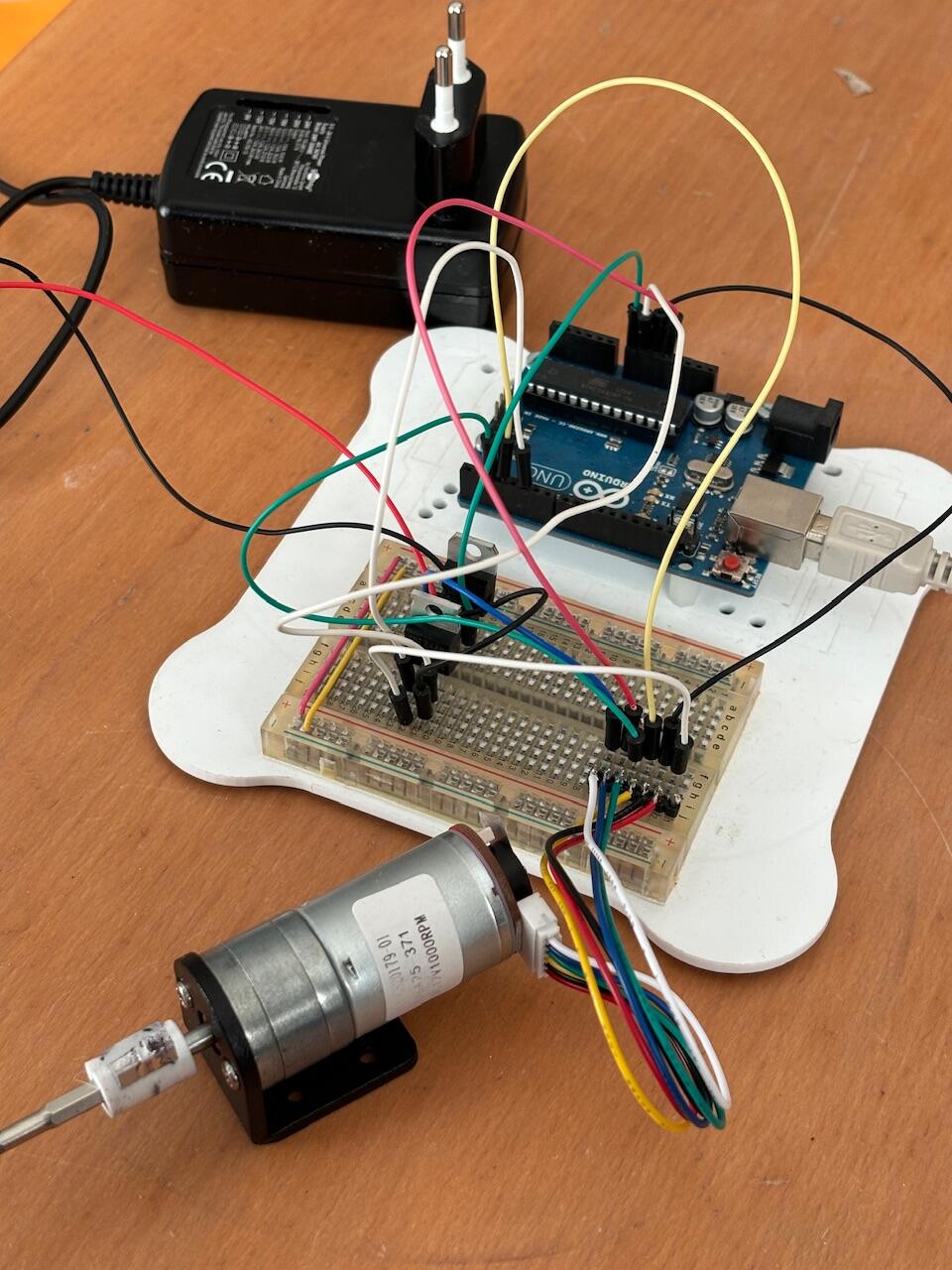
Stilleben mit Kabelsalat Heutige Erungenschaften: - Code aufgeräumt - K Wert konfigurierbar gemacht - Zielgeschwindigkeit konfigurierbar gemacht - Mal wieder an der Integer Division gescheitert - Spannungsregler für den Arduino montiert - Spannungsexperimente gemacht. Mit 18V Eingangsspannung kann man bis zu 80kmh bei k=1 abdecken. Für die 100kmh brauchte ich 24V. - Drehzahl mit dem Drehzahlmesser abgeglichen - Linearität des Tachos geprüft. 40, 60 und 80kmh sind genau. Bei 100 zeigt der Tacho zu viel an.
-
Wären denn RPI 1 geeignet um ein Kalibriergerät zu bauen? (Interrupts, PWM) Ich hab keinen Bedarf, hab hier noch nen RPI4 liegen falls mein RPI3 für das pi-hole mal abraucht aber mit Servern spiele ich schon im Hauptberuf da mache ich daheim eher weniger.
-
Im GSF aber hoffentlich für nen besseren Preis
-
Ich hoffe ja dass der Moderationsaufwand etwas runter geht im Marktplatz. Ich meine bei Kleinanzeigen schaffen es die meisten ja auch die Mindestanforderungen (Standort, Bild, Beschreibung, Preis) zu erfüllen, warum nicht hier?
-
Sommerprojekt: Schon wieder PK?
pfupfu antwortete auf pfupfu's Thema in Vespa V50, Primavera, ET3, PK, ETS etc.
Von außen sieht es auch gut aus, bin sehr zufrieden. Wenn man es drauf hat kann man mit einer Dose bequem zwei Deckel machen. Ich hab ein bisschen mehr gebraucht. Die Orangenhaut schiebe ich auf meine Fähigkeiten, da werde ich nach dem Aushärten nochmal drüber polieren.

-
kurzes Update zum Projekt: Ich habe in den letzten Tagen überlegt wie ich ich die Drehzahl steigern kann um die 60kmh zu ermöglichen, bei Zahnrädern oder Riemen braucht man zusätzliche Mechanik da stimmen Kosten und Nutzen für mich nicht. Ich hab mir mal eine Spannungsquelle besorgt die auch mehr als 12V kann, ein bisschen mehr Überspannung wird der Motor schon abkönnen. Weiterhin werde ich mal den Aufbau vereinfachen und ein kleines Arduino shield löten mit 12V Spannungsregler für den Arduino und dem Mosfet. und auch mal den Kabelsalat aufräumen. Dann geht es ans Gehäuse designen! Display steht noch offen, hat jemand einen Vorschlag für ein kleines LCD ggf. auch mit Tastern?
-
Sommerprojekt: Schon wieder PK?
pfupfu antwortete auf pfupfu's Thema in Vespa V50, Primavera, ET3, PK, ETS etc.
falsche Farbe -
Egig170 - 99% Plug & Play
pfupfu antwortete auf egig's Thema in Vespa V50, Primavera, ET3, PK, ETS etc.
auf der selben Seite hier im Topic ist eine v50 mit 170er und elestart, wie wärs denn damit? -
Autisa 121 - ja sicher doch !
pfupfu antwortete auf Deep4's Thema in Vespa V50, Primavera, ET3, PK, ETS etc.
@Vic wie ging es denn weiter? Ich brauche hier mal die Schwarmintelligenz. Für meinen 121er vom @Dr.Tyrell brauche ich noch Bolzenclips. 15mm rund ist klar aber die Vertikalen bieten 1mm, 1,2mm und 1,25mm an und ich bin überfordert damit welche brauch ich? -
Sommerprojekt: Schon wieder PK?
pfupfu antwortete auf pfupfu's Thema in Vespa V50, Primavera, ET3, PK, ETS etc.
Die Rückseite ist schonmal nicht schlecht geworden, lässt sich gut verarbeiten! Disclaimer: Ich bin der absolute Minuslackierer
-
Egig170 - 99% Plug & Play
pfupfu antwortete auf egig's Thema in Vespa V50, Primavera, ET3, PK, ETS etc.
Für den Mikuni hab ich mir M2,5 Unterlegscheiben übers Internet besorgt. K57 hat 2,5mm laut Datenblatt das sollte passen. So ne 2,5er Scheibe macht ziemlich genau nen halben clip Dellorto Teile kaufe ich bei Stein Dinse -
Sommerprojekt: Schon wieder PK?
pfupfu antwortete auf pfupfu's Thema in Vespa V50, Primavera, ET3, PK, ETS etc.
68€ Inkl. Versand später Mal sehen wie sich der Kram verarbeiten lässt.
-
Egig170 - 99% Plug & Play
pfupfu antwortete auf egig's Thema in Vespa V50, Primavera, ET3, PK, ETS etc.
Genau. Ich fahr wo es geht 350er ohne Pumpe und 250er mit Pumpe. Negatives kann ich nicht berichten. -
BellaVespa: Welches Setup für Führerschein A1?
pfupfu antwortete auf BellaVespa's Thema in Vespa V50, Primavera, ET3, PK, ETS etc.
Ich hab in der DBM mal Hantelgewichte auf einem Gepäckträger gesehen um mehr Gewicht auf die Vorderachse zu bringen -
Ich habe meinen größten Feind besiegt: Die Integer Division Jetzt kann ich auch die Drehzahl Berechnen wenn die Anzahl der Encoderticks nicht 10 oder 100 ist 11 ist die Zahl und nun liest der Code auch die selbe Drehzahl wie das Kontrollmessgerät Den PID Regler bekomme ich auch so langsam in den Griff. Nächstes Problem: Der Motor schafft in dem Setup an 12V nicht die 1000rpm am Ausgang. 833rpm (50kmh) gehen top.
-
Das scheint schon so zu passen, Motordrehzahl bei 12V sind 8450rpm laut Drehzahlmesser, die Ausgangsseite hat 910rpm im Leerlauf. Untersetzung gemessen 9,2755:1 und es sind ja auch fast 1000rpm
-
oha! Ich hab noch nen zweiten bestellt weil ich schon damit gerechnet habe dass da irgendwas komisch wird. Den zweiten werde ich mal bei Zeit auspacken und checken… und ggf reklamieren Nächstes Problem wird dann das halbierte Drehmoment bei korrekter Untersetzung
-
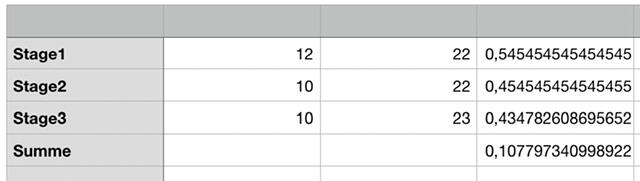
Ein bisschen was aus dem inneren des Motors, einen Laser Drehzahlmesser habe ich auch mal besorgt. Das heisst die angegebenen 4,4 machen keinen Sinn, es sind rechnerische 9,276:1 oder die Ausgangsdrehzahl ist die Motordrehzahl x 0,107797 Die 9,27:1 entsprechen auch der visuellen Kontrolle beim Drehen



-
@Sprint 21 bist du jetzt fertig?