JoeHännes
-
Gesamte Inhalte
79 -
Benutzer seit
-
Letzter Besuch
Inhaltstyp
Profile
Forum
Kalender
Shop
Articles
Alle Inhalte von JoeHännes
-
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
JoeHännes antwortete auf chili023's Thema in Vespa Lambretta Projekte
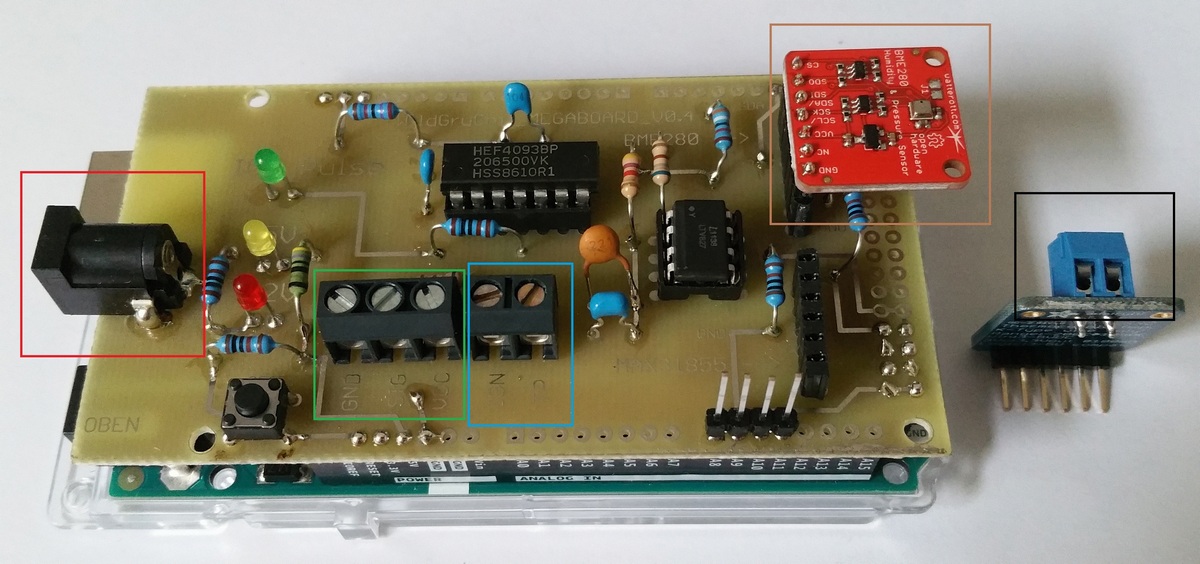
Hallo Leute, Post war da. Hab alles ausgepackt und zusammengesteckt. Funktioniert!! Vielen Dank für die gute Anleitung. Mit dem Sketch und hochladen und so hat alles auf Anhieb geklappt! Laut meinem Aldi Barometer stimmt die Temperatur nicht. Aldi: 19,2 °C BME: 21,2 °C Bei der Luftfeuchtigkeit Aldi: 60% BME: 58% Luftdruck BME: 95235 Pa Aldi Ding hat das nicht! Muss dazu sagen, hab die Teile auch gerade erst von der kalten Werkstatt reingeholt. Lasse die jetzt mal hier liegen und schaue morgen nochmal. So sieht das ganze aus! Ich habe noch einige Fragen, bevor ich die Kiste weiter zeichne. 1.) Welches Teil passt in den 12V Anschluss? (Rot markiert) 2.) Die Signale für den Rollengeber sind ja GND(Masse),SIG(für Signal) und VCC(ist das für die Spannungsversorgung +Pol???) (Grün markiert) 3.) Die Signale für die Zündzange (Blau markiert) sind IGN (für Signal) was ist der zweite für einer? Da steht TP (ich hab aber von der Zündzange nur 1 Kabel??) 4.) Das BME hab ich jetzt dort rein gesteckt. Ich will es aber in eine separate Box packen um es bei mir in der Werkstatt ein bisschen höher zu hängen. Kann ich das jetzt mit ganz normalen Kupferkabeln verlängern, oder brauche ich da auch spezielle Kabel? Geht das überhaupt, dass ich da ein 1,5 Meter langes Kabel dran mache, oder werden meine Ergebnisse dann durch den Widerstand der Leitung verfälscht? 5.) Das MAX (Schwarz markiert) dort kommen die Kabel für das Thermoelement rein. Das dürfen, wie ich zuvor gelesen habe, keine Kupferleitungen sein. Ich würde gerne dort einen Adapter ran machen, den ich an der Box befestige, wo ich dann so ein Teil vom Thermoelement reinstecken kann. Weiß jemand wo ich sowas bekomme? Musste das Gegenstück zu dem oben zu sehenden Teil sein. Quasi die Buchse dazu. Die Leitung müsste so 10 cm lang sein. Nur bis außen zur Box hin. Vielen Dank für eure Hilfe! Gruß, Johannes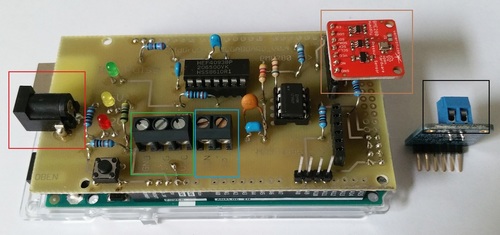
.thumb.jpg.1431e06d28bb62d1b3a23ba9fa3acf5a.jpg)
-
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
JoeHännes antwortete auf chili023's Thema in Vespa Lambretta Projekte
Das Arduino Mega 2560 R3 kann aber auch über ein 12V Netzteil direkt versorgt werden, oder? Könnte ich dann mein Induktiven Näherungsschalter auch sofort damit betreiben? Also kann ich die 12V Eingang am Arduino auch irgendwo wieder raus ziehen für meinen Sensor? Spricht irgendwas dagegen, oder warum wollte ihr das mit 5V machen? Gruß -
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
Kannst du jetzt beide Signale am abnehmen und musst keine Getriebeübersetzung mehr angeben? -
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
Wo hast du die Absaugung her? Gruß -
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
Die Schaltung von Minimalkart die hier schon öfter gepostet war läuft und läuft. Bis 15000 1/min ohne Probleme. Gruß Johannes -
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
Ja vielleicht ist deine Steuerung ganz easy und gut durchdacht. Nur seit ihr euch wirklich sicher das GSF Dyno das kann? Dann frage ich mich nämlich was bei mir falsch läuft. Gruß -
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
Ich hätte es auch gerne so wie du. Ohne immer ausrechnen zu müssen. Ich sag mal mein Moped was ich weiterentwickel für mich ändert sich ja nicht, aber wenn mal bekannte und andere vorbeikommen ist das schön doof. Eine Messung gemacht und dann ewig rumsuchen wegen übersetztung Reifenumfang.... Da muss was einfacher gehen. Ich habe gemeinsames Masse. Liegt es daran? Gruß -
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
http://www.m-m-o.de/index.php?page=Attachment&attachmentID=12178&h=c644ef28fa53d9b5d173fddfdd092d9dd57f0d09 http://www.m-m-o.de/index.php?page=Attachment&attachmentID=12179&h=bfe492cc224e0c158bf9f589e6e05a54222e3b41 http://www.m-m-o.de/index.php?page=Attachment&attachmentID=12180&h=23dafff443dbb881a3d6d8317f5f05bd6632595e http://www.m-m-o.de/index.php?page=Attachment&attachmentID=12181&h=4b2f1f233ed4dc02732985b0d014bbc8d7c722d3 Das steht aber auch irgendwo hier im Forum. Gruß -
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
Ich habe wie schon ein paar Seite vorher gezeigt und erwähnt, diesen Sensor. Er beinhaltet einen Induktiven Näherungsschalter der Marke Wenglor mit der Bezeichnung IB040bm37vb. Habe ihn mit 0,4mm Abstand zu meiner Schraube in der Welle ausgerichtet. Dazu ist an der "Messkiste" eine Zündzange dran. Einfach an das Zündkabel klippen. Jede Funktion für sich funktioniert ohne Probleme. Nur wenn ich beide Signale aufnehme, kommt nur Mist herraus. Die "Messkiste" für Zündzange habe ich von Minimalkart (glaube auch hier im Forum), sonst mich anschreiben und ich gebe euch mal seine Mail Adresse. Den Induktiven Näherungsschalter mit dem 12 Volt Netzteil hat mir ein Kumpel einfach nur da eingelötet. War sehr leicht. Jetzt müsste GSF nur noch 2 Signale verwenden können. Gruß Johannes
-
GSF Dyno - Leistungsdiagramm selbst gemacht...
JoeHännes antwortete auf atom007's Thema in Vespa Lambretta Projekte
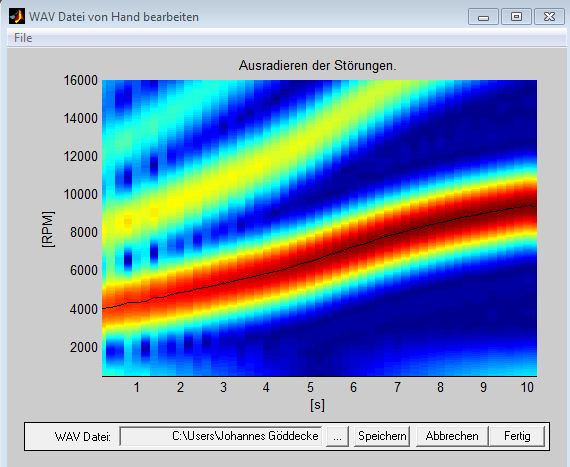
Mein Signal sieht irgendwie stärker aus.
-
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
Schaut gut umgesetzt aus, aber wieso macht ihr die Verstellung hinten? Vorne ist doch viel einfacher umzusetzen? Gruß -
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
Leider hab ich nicht so viel mit Vespa zu tun. Ich hätte gerne eine, aber ich hab noch so viel andere Projekte. Ja das Mopedrennen in Liedolsheim. Da werde ich wohl dieses Jahr mitfahren. Hoffentlich sieht man sich. Gruß -
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
Für die Lager ab ich schon Abdeckplatten gefräst. Die sind nur noch nicht dran. Das mit der 2ten Schraube ist nicht so einfach. Die müsste dann ja exakt um 180° versetzt. Das wird nie so genau und dann sind die Diagramm auch nciht sauber. Das mit 1 Schraube ist ganz ok. Ich messe meißt so im Bereich um 80 km/h. Bei der Mofa auf dem Bild nun natürlich nicht:) Gruß -
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
Ist ein Induktiver Näherungsschalter von der Firma Wenglor. Genaue bezeichnung müsste ich erst raussuchen. Wird mit einem 12 Voltnetzteil betrieben. Gruß -
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
So ich möchte mal meinem Leistungsprüfstand für 2 Räder aller Art vorstellen. Die Idee entstand vor ca 2 Jahren. Ich habe mir in den Kopf gesetzt in Liedolsheim mitzufahren. Sind dann zum Rennen gefahren und haben uns das angeguckt. Da habe ich dann mit einigen Teams gesprochen die alle sagten ohne Prüfstand geht gar nichts. Damals hatte ich wenig Ahnung und wusste gar nicht was ich damit alles machen kann. Ein bisschen informiert und nachgeforscht, da kam dann langsam der Aha Effekt und ich dachte sowas geiles brauchst du auch. Habe dann geguckt und hier in meiner Region( Sauerland) hat auch keiner einen soweit ich weiß. Dann habe ich mir gedanken um die Konstruktion und die Welle gemacht. Schwer genug muss sie sein um dem empfinden auf der Straße einigermaßen gleich zu kommen. Habe dann gehört das man eine Beschleunigungszeit von ca 8 Sekunden durch das Leistungsband haben sollte. In dieser Zeit heißt sich der Auspuff ähnlich auf wie unter den Bedingungen auf der Straße. Habe dann geschaut mit welchen Abmaßen ich ein Massenträgheitsmoment hinbekomme mit dem ich ca die Zeit habe. Durchmesser 400mm 300mm breit. MTM 5,9 kg/m² Da ist die Wahl gefallen. Dann habe ich gezeichnet und dann wurde gedreht. Vierkantrohr gesägt, geflext, angepasst, verschweißt, gebohrt . Dabei kam dann das herraus. Die Lager sind von SKF und haben einen Durchmesser von 65mm. Die sind für 4000rpm zugelassen, das entspricht ca 300 km/h. Ich muss den Prüfstand noch mit einem anderen abgleichen, aber um einen Motor weiterzuentwickeln oder herrauszufinden mit welcher Zündeinstellung er am besten läuft, oder um zu schauen welcher Auspuff sich wie verhält ist der Prüfstand super. Wer mal durch Sauerland kommt oder hier wohnt kann gerne mal ne Nachricht schreiben. Dann machen wir für Samstags mal nen Termin aus und dann wird getestet. Gegen eine kleine Spende in die Kaffeekasse:) Gruß Johannes -
Leistungsprüfstand - Wer bastelt mit...
JoeHännes antwortete auf MiNiKiN's Thema in Vespa Lambretta Projekte
Ich nehme das WaveFile von meinem Prüfstand am PC auf. Mache das mit No. 23 Recorder. Dort ist die niederigste Frequenz 44100 Hz. Gibt´s ein Line In Aufnahmeprogramm wo man die Frequenz noch runterstellen kann? Gruß Johannes -
GSF Dyno - Leistungsdiagramm selbst gemacht...
JoeHännes antwortete auf atom007's Thema in Vespa Lambretta Projekte
Ich habe Zeit. Es wäre natürlich schön jetzt über die Weihnachtstage hätte man sicherlich etwas Zeit. Wenn jeder dazu was beitragen will, dann wird die Arbeit weniger. Gruß -
GSF Dyno - Leistungsdiagramm selbst gemacht...
JoeHännes antwortete auf atom007's Thema in Vespa Lambretta Projekte
Ja dann können wir ein Neues Open Source Projekt starten. Ich füge direkt mal was ein was ich in den letzten Tagen so dazu geschrieben hab. In dem Programm sollte man dann eine Eingabe Oberfläche haben in der man folgende Eingabe Felder einzugeben hat: Trägheitsmoment Prüfstandsrolle(kg/m²): Luftdruck(mBar): Luftfeuchtigkeit(%): Temperatur(°C): Motorart: Auswahlmenü zwischen 2Takt-Motor und 4Takt-Motor. Die eingegebenen Werte sollten beim nächsten Start des Programms wieder aufgerufen werden. Dann muss das Programm erstmal mit den Werten auf der Ausgabeseite arbeiten! Gestartet wird die Messung per Start Knopf. Sobald der Knopf betätigt wird bekommt das Programm den Befehl die Signale auszuwerten. Sensor 1: Das Programm zählt den Zeitabstand der zwischen dem ersten überfahren der Messschraube am Sensor und dem zweiten Überfahren der Messschraube am Sensor vergehen.(1 Umdrehung der Welle) Das Programm zählt also die Zeit zwischen überlaufen der Messschraube, bis zum nächsten überlaufen. Mit dem Wert wird dann gerechnet. Zeitgleich zählt Sensor 2 die Stromimpulse am Zündkabel.(im Endeffekt die Drehzahl des Motors. Der Zweitakter gibt bei jeder Umdrehung 1 Impuls pro Umdrehung ab ein Viertakt Motor 1 Impuls pro 2 Umdrehungen) Ob 2 oder Viertakter lässt sich in der Programmoberfläche auswählen. Der Sensor2 ist nur für die Drehzahl in der Anzeigegrafik. Wie auf dem Bild zu erkennen steht der Hinterreifen des zu messenden Objektes auf der Welle. Seitlich an der Welle befindet sich die Messschraube und der Sensor. w = ((2 * PI) / (T)) (Winkelgeschwindigkeit = 2 * PI /t ( Zeit zwischen überlaufen der Messschraube und dem nächsten Überlaufen Dieser Messwert wird gespeichert. Die Rolle dreht sich weiter. Das Programm zählt nun wieder die Sekunden( oder ms) und wieder wird die Winkelgeschwindigkeit ausgerechnet ….. immer wieder und wieder…. Jetzt weiß das Programm die Zeit der Drehzahländerung. Zeit zwischen überlaufen Messschraube und den darauffolgenenden Überlaufen (damit kann es erneut die Winkelgeschwindigkeit ausrechnen) Außerdem wird der Wert benötigt um die Winkelbeschleunigung auszurechnen. a = w / t (Winkelbeschleunigung = Winkelgeschwindigkeit / Zeit der zwischen der nächsten Umdrehung) Dann kann das Programm die Winkelbeschleunigung ausrechnen. Dieser Wert geht in den Speicher und mit dem Ergebnis wird dann wird das Beschleunigungsmoment ausgerechnet. M= J * a J muss ja in der Programmoberfläche eingeben werden (Trägheitsmoment Prüfstandsrolle) das wird dann mit dem gespeicherten a Wert multipliziert. So erhält man M und das wird dann mit der Winkelgeschwindigkeit multipliziert und man erhält Leistung P. Das Ergebnis wird dann mit dem Klima Korrekturfaktor multipliziert, wenn Klimakorrektur Werte eingeben wurden. P= w * M * Klimakorrekturfaktor Klimafaktor: Luftdichte: Luftdruck/Rf*Temperatur(in Kelvin) Rf: Gaskonstante 287,058/ (1-(Luftfeuchtigkeit*pd/Luftdruck)*(1- Gaskonstante 287,058/Wasserdampfkonstante(461))) Rf: Gaskonstante 287,058/ (1-(Luftfeuchtigkeit*pd/Luftdruck)*0,377314534) Pd = 611,213*exp((17,5043*Temperatur(°C))/(241,2+Temperatur(°C))) Luftdichte/1,2041= Klimafaktor (K1) Dann wird der Wert der Leistung P für die Drehzahl x gespeichert. Drehzahl ergibt sich dem Überlaufen der Messschraube an der Welle. Die Drehzahl im Diagramm für die Leistungskurve wird vom zweiten Sensor am Zündkabel abgegriffen. Das Ergebnis wird dann für die Ausgabe in der Grafik Leistungskurve gespeichert. Die Rolle dreht sich weiter und es wird weiter gemessen…die Schritte laufen wieder und wieder ab, bis irgendwann die höchst Drehzahl erreicht wurde. Die Messung ist dann zu Ende wenn die Drehzahl am Sensor 2 um mehr als 1500 Umdrehungen/pro Minute abfällt. Hoffe das war jetzt verständlich genug. Ich brauche nun einen Sensor zB einen Induktiven Näherungschalter(hab ich schon) und die eine Software dazu. Für die Drehzahlabnahme am Zündkabel könnte man ja vllt Olvier´s Idee von der Vorderseite aufgreifen. Gruß -
GSF Dyno - Leistungsdiagramm selbst gemacht...
JoeHännes antwortete auf atom007's Thema in Vespa Lambretta Projekte
Die Software muss Signale lesen können. Also Schnittstellen abfrage. Entweder per USB oder RS232. Wobei USB besser wäre weil man davon viele Schnittstellen hat. Die Software muss also sagen wir mal 40mal pro Sekunde. Eine Zeit messen können. Zwischen den Umdrehungen an der Welle. Oder vielleicht auch Hintterrad. Dann muss die Software den zweiten Sensor abfragen. Zange am Zündkabel für die Drehzahl im Diagramm. Der zweite Sensor ist wichtig, damit man nicht mehr die Übersetzung eingeben muss und auch um Variomatik Motoren zu testen. Dann muss die Software rechnen können und die Ergebnisse dann im Diagramm anzeigen können. Gruß -
GSF Dyno - Leistungsdiagramm selbst gemacht...
JoeHännes antwortete auf atom007's Thema in Vespa Lambretta Projekte
Willst du selbst eine neue Software entwickeln? Da würde ich mich gerne einschalten und Ideen dazu geben. ICh kann nur leider nicht programieren. Kennt jemand einen Programmierer mit Ahnung von Elektrik? Er sollte Schnittstellenabfrage und Grafiken draufhaben. Gruß -
GSF Dyno - Leistungsdiagramm selbst gemacht...
JoeHännes antwortete auf atom007's Thema in Vespa Lambretta Projekte
Kreiszahl PI ist 3,14.... Bist du Lehrer oder was meinst du mit Schülern? Gruß -
GSF Dyno - Leistungsdiagramm selbst gemacht...
JoeHännes antwortete auf atom007's Thema in Vespa Lambretta Projekte
J=1/2*Masse*Radius² ist das Trägheitmoment der Rollte und wird in kg/m² angegeben. Leistung zu berechnen ist wenn man was von Programieren versteht eigentlich ganz einfach. P= w * M M= J * a J= 1/2*Masse*Radius² a = w / t w = ((2 * PI) / (t)) t= Zeit zwischen den Umdrehungen -
GSF Dyno - Leistungsdiagramm selbst gemacht...
JoeHännes antwortete auf atom007's Thema in Vespa Lambretta Projekte
So nachdem ich lange schon hier was online stellen wollte hat es nun endlich geklappt. Diese wunderkiste habe ich in meinem Besitz und will sie nicht mehr hergeben. Sie wurde von jemanden entwickelt der da Zeit und Hirnschmalz investiert hat und deshalb will ich nochmal darauf hinweisen das nicht ich diese Plantine gemacht habe, sondern die von einem entwickelt und durchgeprüft wurde der Ahnung davon hat. MP3 Player mit Line In Aufnahme Funktion an die Kiste angeklemmt Batterie eingelegt auf On gedrückt, Klemme ans Zündkabel und los geht die Suche nach Leistung. Es ist sogar möglich für die jenigen die einen Prüfstand besitzen eine zweite Aufnahmequelle anzuschließen zb sensor der Rolle. Meines Wissens nach ist es möglich mit GSF Dyno 2 Signale auszuwerten. Gruß Johannes Platine.pdf Schaltplan.pdf Bedienungsanleitung.pdf Ansicht Zündungsaustastung.pdf Platine.pdf Schaltplan.pdf Bedienungsanleitung.pdf Ansicht Zündungsaustastung.pdf -
GSF Dyno - Leistungsdiagramm selbst gemacht...
JoeHännes antwortete auf atom007's Thema in Vespa Lambretta Projekte
Bei mir ist die Unterteilung anders. So ca. 0,6U/min. Aber das ist auch ein anderes Moped. Gruß -
GSF Dyno - Leistungsdiagramm selbst gemacht...
JoeHännes antwortete auf atom007's Thema in Vespa Lambretta Projekte
Ich denke das kommt auf die Anzahl der Messpunkte an. Also LiMa Signale pro Umdrehung. Je mehr desto mehr Datenpunkte, desto feiner die auflösung(0,1 U/min) Gruß
.jpg.4e910466307d025a40ff8c4915f077f9.jpg)