grua
-
Gesamte Inhalte
2.390 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
3
Inhaltstyp
Profile
Forum
Kalender
Shop
Articles
Community Map
Alle Inhalte von grua
-
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
Ich mach nur LabView, zum *.ino kann nur @chili023 was sagen -
Nur mal schnell 'ne Largeframe-Technikfrage
grua antwortete auf StephanCDI's Thema in Vespa PX, T5, Cosa etc.
Ja, mit der kleinen Knipex geht das! Es gibt von Knipex große und kleine. Fürn Kolbenbolzenclip benötigst du die kleine. Oder besser gleich das Set hier besorgen: https://www.knipex.de/index.php?id=1216&L=0&page=art_detail&isMobile=&parentID=1373&groupID=1491&artID=396 -
If you live in the mountains take 22/68 or 23/68. Only if you live in a plain, I would suggest 23/65. An other possibility would be 22/65. My plug&play polini 177 with sip road does fine in the mountains with standard px125-gearimg and 22/68
-
welcher Zylinder der 166/177er Klasse macht am wenigsten Ärger
grua antwortete auf Vespatreiber's Thema in Vespa PX, T5, Cosa etc.
Und darum BGM, damit der Kreis sich wieder schließt! -
GELÖST Verschraubung Kupplungskorb V50 1. Serie
grua antwortete auf kingcarl916's Thema in Vespa V50, Primavera, ET3, PK, ETS etc.
Also ohne das selbst jemals live gesehen zu haben hätte ich jetzt mal geschätzt, dass man zuerst die Mutter runterschrauben muss (so wie sonst den Seegering entfernen) umd dann Korb aus Lager raus. Schon so versucht? -
Nur mal schnell 'ne Largeframe-Technikfrage
grua antwortete auf StephanCDI's Thema in Vespa PX, T5, Cosa etc.
habe bisher mit den BGM Pro Zündplatten in Verbindung mit dem Polrad hier ausschl. gute Erfahrungen: http://www.scooter-center.com/de/product/7320018 -
Würde das Gehäuse samt Welle zum Kobold schicken zur Drehschieber-Reparatur Ups, da war irco schneller [emoji106]
-
Warum? Nur wegen des IT-Preises?
-
Ist der DR 177 wirklich so ne Krücke?
grua antwortete auf Thoerty's Thema in Vespa PX, T5, Cosa etc.
Fahr ident das selbe. Läuft super! Fürn DR reicht dann vmtl ein 22er Ritzel. Drückt i.d.R. dann ja doch deutlich weniger als der BGM -
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
OK, dann vergess ich das mit den Filtern wieder. D.h. also, dass sich nach Start der Lesepuffer füllt, dieser dann aber nach und nach abgearbeitet wird, bis dann letztendlich immer nur 1 Telegramm enthalten ist und ab dann alles in Echtzeit läuft, wenn ich dich richtig verstehe? Ich hatte anfangs, als ich noch ein älteres, langsames Notebook mit Win10 nutzte, ähnliche Symptome. Da musste ich nach dem Booten oft mehrere Minuten lang warten, bis obiger Effekt nicht mehr auftrat. Ursache war, dass nach dem Booten die Datenträgerauslastung längere Zeit auf >90% lief (kontrolliert mit Windows Taskmanager). Ursache dafür waren vmtl. Updates (Virenscanner usw.), welche nach Windows-Start ziemlich lange andauerten. Wenn ich gewartet hatte, bis die Datenträgerauslastung auf Normalmaß runter gefallen war und dort auch blieb, lief dann alles astrein. Seitdem ich das Notebook vom WLAN getrennt habe, also nicht mehr im Netzwerk hänge, tritt obiger Effekt nicht mehr auf. Natürlich gibt’s dann auch keine Windows- und Virusupdates mehr… Evtl. ist dein Problem ja ähnlich gelagert. Edit: Thema geklärt, Problem lag an Werners Arduino-Sketch, mit dem korrekten Sketch läufts auch bei Werner problemlos! -
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
Wie genau äußert sich dein LabView-Performanceproblem? Sind immer mehrere Arduino-Telegramme im Lesepuffer enthalten (= Anzahl Zeilen im Lesepuffer links unten)? Im Idealfall sind da immer nur ein bis zwei Telegramme (Zeilen) enthalten, im Optimalfall immer nur eine. Wenn mehrere Zeilen enthalten sind, dann gehen diese Telegramme zwar nicht verloren, werden aber der Reihe nach abgearbeitet. Und dadurch verzögert sich natürlich das dargestellte Drehzahlsignal. Oder ist zwar immer nur eine Zeile enthalten, die Zeiger arbeiten aber trotzdem zeitverzögert? Ich glaube, dass an die Drehzahlanzeigen immer die per gleitendem Mittelwert gefilterten Drehzahlen dargestellt werden. Durch die Filterung entsteht natürlich ein gewisser Zeitverzug. Ob das wirklich so ist, dazu müsste ich mal einen Blick ins LabView-Programm werfen, dazu komme ich aber frühestens heute Abend. Falls letzteres der Fall ist (also Zeitverzug durch die Filterung, obwohl immer nur 1 Telegramm im Lesepuffer enthalten ist), dann könnte man das evtl. so lösen, dass man zumindest im Tachobetrieb auf die Filterung verzichtet. Oder ein Optionsfeld setzt, mit welchem man auswählen kann, ob in den Drehzahlanzeigen die gefilterte oder die ungefilterte Drehzahl angezeigt werden soll. Aber erst wäre mal wichtig zu wissen, wie genau sich dein Laufzeitproblem äußert bzw. wodurch es verursacht wird. -
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
So, hier mal ein Versuch mit Tacho-Betrieb: Reiter "Recalc" umbenannt auf "Betriebsmodus & Recalc". In diesem findet man nun einen Kippschalter , mit welchem man zw. den Betriebsmodi "Leistungsmessung" und "Tacho" umschalten kann. Bei "Tacho" werden nach "Start" die Klimadaten nicht eingelesen, aber die Übersetzung wird wie gehabt ermittelt. Anschließend werden die vom Arduino kommenden Frequenzen nicht mehr in Arrays gespeichert, sondern nur noch auf zwei großen Drehzahlanzeigen visualiert. Ihr könnt entweder das gesamte Projekt downloaden: https://github.com/gruaGit/WildBugChilGru/archive/2.0.1.zip oder auch nur die EXE, und die bisherige durch diese ersetzen (die bisherige aber vorher sichern ): https://github.com/gruaGit/WildBugChilGru/raw/2.0.1/LabVIEW/01_EXE/WildBugChilGru.exe Kam leider noch nicht dazu,das ordentlich testen, bitte daher um Tests! -
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
Ich mach mal im ersten Schritt nur die Tachos (ohne afr usw) und stelle die exe dann hier mal als Testversion rein. Sollte im Laufe der Woche kommen mit der Bitte um Test und Rückmeldung, ob das so aussieht und funktioniert wie es soll. Weitere Werte (afr, ...) dann im Anschluss. Dazu bitte aber vorher um Abstimmung mit@chili023 Evtl hat er dbgl. schon was gemacht? -
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
@Werner Amort, bin gerade am Realisieren der beiden Live-Tachos. Dauert noch ein bisschen, aber kommt! -
Ist der DR 177 wirklich so ne Krücke?
grua antwortete auf Thoerty's Thema in Vespa PX, T5, Cosa etc.
Sorry, will da niemandem zu nahe treten, aber was ist daran besonderes? BGM177, 60mm LHW, SI26 und BGM BigBox mit 14 PS - äh das kann jetzt aber eigentlich jeder, dazu muss man kein Profi sein? -
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
Einen Debug-Sketch zur Laufsimulation hat chili023 auch schon mal geschrieben, ist sehr praktisch zum Testen der Software, aber du hast jetzt eh schon deinen eigenen Die Verzögerung ist tats. egal, da geht nichts verloren. Richtig, wenn du nvomGas hoch genug setzt, dann müsste der Lauf bis zum Abbruch laufen. Die Messdatenspeicher (Arrays) werden halt immer größer, keine Ahnung, wo dann mal leistungsmäßig oder speichermäßig Schluss ist, hab das nie versucht. Aber das kannst du ja gerne testen! Das mit dem Reiter Tacho ist eine gute Idee, sollte eigentlich kurzfristig realisierbar sein. Einfach die beiden Uhren 1/min und km/h nebeneinander groß am Bildschirm ohne die laufenden Messdaten abzuspeichern, so dass man im Gegensatz zum "nvomGas hochsetzen" keinen Speicher anfüllt. Mal sehen, entweder @Bughardcore oder ich kommen da sicher mal dazu! -
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
Unterstützung ist immer toll! Worauf@chili023 zuletzt immer drängte, was Lambda. Dazu wäre auch im Arduino was zu tun, anschl. in LV. Müsste chili023 was dazu sagen (= unser Arduino-Meister) -
12 Nm reichen doch i.d.R. allemal für den SI. Bei einem meiner SI24 klemmts auch, wenn ich den fester anziehe. Mit "Handgefühl" angezogen und Loctite mittelfest, hält das aber wunderbar und der Schieber klemmt nicht mehr. Dichtungen die dicken grünen (z.B. vom SCK) mit ganz dünn Dichtmasse und dann ist das auch trotz geringerem Anzugsmoment dicht.
-
Ist der DR 177 wirklich so ne Krücke?
grua antwortete auf Thoerty's Thema in Vespa PX, T5, Cosa etc.
Verbaue für einen Kumpel gerade erstmals einen DR (bisher immer Polini und BGM). Frage: Beim DR auch sicherheitshalber immer GS-Ringe rein, so wie beim Polini oder reichen beim DR die originalen Ringe? -
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
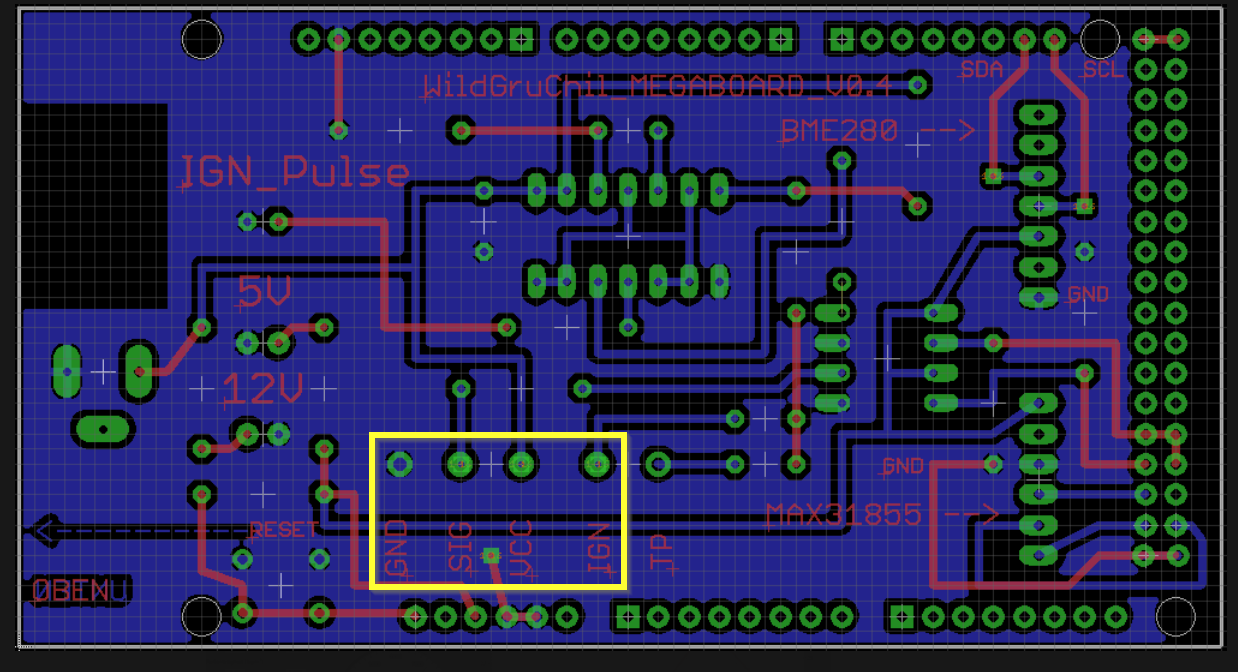
dann nochmal: Besorg dir eine 5V WildGruChil_Shield_v4 Platine von chili023. Evtl. hat er ja eine unbestückte, falls du selber löten möchtest. Die Platine gibt auf VCC 5V gegenüber GND aus, das benutzt du zur Versorgung des Drehgebers. Entweder A oder B des Gebers schließt du dann auf SIG der Platine an mit einem Pullup-Widerstand auf VCC oder Pulldown auf GND. Welchen, muss @chili023 sagen. Ich glaub 1 kOhm pullup wars, aber bin mir da nicht mehr sicher. (Pullup bzw. Pulldown-Widerstand nur bei Geber mit open-collector Ausgängen!) Das zweite Signal (B bzw. A) bleibt unangeschlossen, nicht A und B zusammenschließen! Du hast dann 100 Inkr./Umdr.. Du musst mal rechnen, welche Rollendrehzahl du ca. hast bei Maximalgeschwindigkeit und welche Frequenz der Geber dann liefert. Vielleicht macht ja ein Geber mit anderer Auflösung mehr Sinn. Ich würde das System z.B. auf Richtwert ca. 10 kHz Maximalfrequenz auslegen. Zündungsignal (Krokoklemme oder noch besser eine Zange einer alten Zündpistole) wird an IGN der Platine angeschlossen. Edit: ob bei open collector Signalen pullup od. pulldown und welche Widerstandsgröße chili023 fragen! -
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
auf Tapatalk kann ich mein obiges post (zumindest auf meinem Smartphone) nicht ordentlich lesen, da fehlt viel Inhalt. Nach dem Zitat startet es dort erst mit "@chili023 sagen. Ich glaub 1 kOhm", alles davor wird bei mir auf Tapatalk nicht angezeigt - ich hoffe nur bei mir, sonst bitte um Info. -
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
Besorg dir eine 5V WildGruChil_Shield_v4 Platine von chili023. Evtl. hat er ja eine unbestückte, falls du selber löten möchtest. Die Platine gibt auf VCC 5V gegenüber GND aus, das benutzt du zur Versorgung des Drehgebers. Entweder A oder B des Gebers schließt du dann auf SIG der Platine an mit einem Pullup-Widerstand auf VCC oder Pulldown auf GND. Welchen, muss @chili023 sagen. Ich glaub 1 kOhm pullup wars, aber bin mir da nicht mehr sicher. (Pullup bzw. Pulldown-Widerstand nur bei Geber mit open-collector Ausgängen!) Das zweite Signal (B bzw. A) bleibt unangeschlossen, nicht A und B zusammenschließen! Du hast dann 100 Inkr./Umdr.. Du musst mal rechnen, welche Rollendrehzahl du ca. hast bei Maximalgeschwindigkeit und welche Frequenz der Geber dann liefert. Vielleicht macht ja ein Geber mit anderer Auflösung mehr Sinn. Ich würde das System z.B. auf Richtwert ca. 10 kHz Maximalfrequenz auslegen. Zündungsignal (Krokoklemme oder noch besser eine Zange einer alten Zündpistole) wird an IGN der Platine angeschlossen. Anbei auch noch ein paar Läufe (XML) zum damit Rumspielen: Läufe.zip Edit: ob bei open collector Signalen pullup od. pulldown und welche Widerstandsgröße chili023 fragen!
-
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
https://www.amazon.de/dp/B00IJ7876U/ref=cm_sw_r_em_api_c_nvMWzbKDM14R8 Nur so als Beispiel Bei open collector brauchst halt noch pull up Widerstände, was aber kein Problem darstellt -
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
Ob schon wer einen Schrittmotor dran hatte? Keine Ahnung... -
Open Source Prüfstandssoftware auf Basis von Arduino Mega und LabVIEW
grua antwortete auf chili023's Thema in Vespa Lambretta Projekte
Zündimpulsabnahme basiert auf der Minimalkart 12V-Platine benötigst du nur, wenn du einen Drehgeber mit 12V Versorgungsspannung hast. Falls du einen neuen Sensor erst noch besorgst, dann nimm einen mit 5V Versorgung, dann reicht die 5V-Platine. Unterschied: Für die 12V benötigst du zusätzlich ein 12V-Netzteil, de 5V hingegen wird über USB versorgt ohne zusätzlichem Netzteil (USB versorgt dann Arduino, Platine und Drehgeber). Bei der 12V-Platine werden die Gebersignale über Optokoppler auf den Arduino geführt, bei der 5V-Platine fallen die Optokoppler weg. Daher kann die 5V-Platine auch höhere Frequenzen verarbeiten (keine Beschränkung durch Optokoppler). Die Drehgebersignale werden bei der 12V-Variante über Optokoppler auf den Arduino-Eingang geleitet bzw. 5V Drehgebersignale unmittelbar auf den Arduino-Eingang. Keine Spannungsteiler erforderlich. [mention=46888]chili023[/mention] korrigiere mich, falls irgendwas davon nicht korrekt sein sollte, ich hab das so aus der Erinnerung raus geschrieben, ist ja schon eine Weile her, dass wir uns mit der Hardware beschäftigt haben… Rollensensor würde ich einen eigengelagerten Drehgeber mit z.B. so um die 100 Inkremente / Umdrehung nehmen. Gibt’s günstig bei Amazon. Und dazu die 5V-Platine ohne Netzteil und Optokoppler. Wegen der Auflösung musst du halt aufpassen. Soweit ich das im Kopf habe, kann die 5V-Platine bis zu max. 19 kHz Gebersignale verarbeiten. Die 12V glaube etwas weniger wegen der Optokoppler. Das müsste@chili023 ggf. nochmal sagen.